|
A high-performance general-purpose compute library
|
|
A high-performance general-purpose compute library
|
Convolution Integral for two dimensional data. More...
Functions | |
| AFAPI array | convolve2 (const array &signal, const array &filter, const convMode mode=AF_CONV_DEFAULT, const convDomain domain=AF_CONV_AUTO) |
| C++ Interface for convolution on two dimensional signals. More... | |
| AFAPI array | convolve2NN (const array &signal, const array &filter, const dim4 stride, const dim4 padding, const dim4 dilation) |
| C++ Interface for 2D convolution. More... | |
| AFAPI array | fftConvolve2 (const array &signal, const array &filter, const convMode mode=AF_CONV_DEFAULT) |
| C++ Interface for convolution on 2D signals using FFT. More... | |
| AFAPI af_err | af_convolve2 (af_array *out, const af_array signal, const af_array filter, const af_conv_mode mode, af_conv_domain domain) |
| C Interface for convolution on two dimensional signals. More... | |
| AFAPI af_err | af_convolve2_nn (af_array *out, const af_array signal, const af_array filter, const unsigned stride_dims, const dim_t *strides, const unsigned padding_dims, const dim_t *paddings, const unsigned dilation_dims, const dim_t *dilations) |
| C Interface for 2D convolution. More... | |
| AFAPI af_err | af_fft_convolve2 (af_array *out, const af_array signal, const af_array filter, const af_conv_mode mode) |
| C Interface for convolution on 2D signals using FFT. More... | |
Convolution Integral for two dimensional data.
A convolution is a common operation between a source array, a, and a filter (or kernel) array b. The answer to the convolution is the same as computing the coefficients in polynomial multiplication, if a and b are the coefficients.
Another way to think about it is that the filter kernel is centered on each pixel in a, and the output for that pixel or data point is the sum of the products.
Depending on the size of the signal and the filter, any one of the following batch mode convolutions take place.
A detailed explanation of each batch mode for 2D convolutions is provided below. Given below are definitions of variables and constants that are used to facilitate easy illustration of the operations.
We have also used images to showcase some examples which follow the below notation.
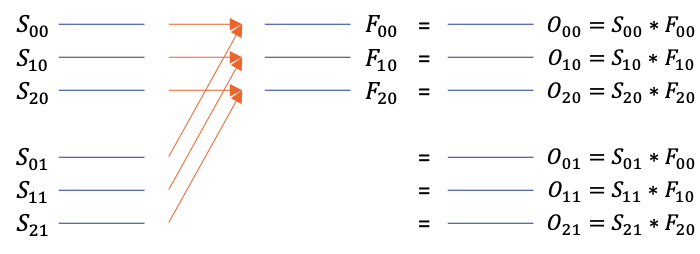
Given below is an example of no batch mode.

For input size \( [M \ N \ 1 \ 1] \) and filter size \( [A \ B \ 1 \ 1] \), the following set-builder notation gives a formal definition of all convolutions performed in this mode.
\( \underset{[M \ N \ 1 \ 1]}{O} \) = \( \underset{[M \ N \ 1 \ 1]}{S} \ast \underset{[A \ B \ 1 \ 1]}{F} \)
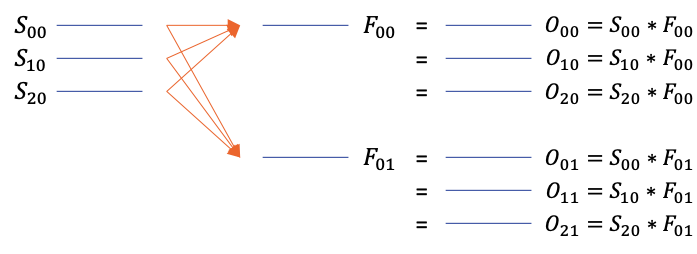
Given below is an example of filter batch mode.

For input size \( [M \ N \ 1 \ 1] \) and filter size \( [A \ B \ P \ 1] \), the following set-builder notation gives a formal definition of all convolutions performed in this mode.
\( \underset{[M \ N \ P \ 1]}{O} \) = \( \left\{ \underset{[M \ N \ 1 \ 1]}{S} \ast \underset{[A \ B \ p \ 1]}{f} \ \Bigg\vert \ \forall \underset{[A \ B \ p \ 1]}{f} \in \underset{[A \ B \ P \ 1]}{F} \right\} \)
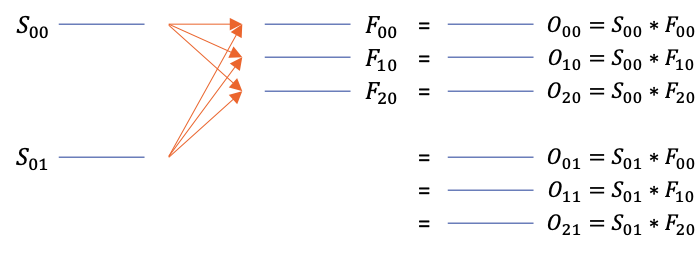
Given below is an example of signal batch mode.

For input size \( [M \ N \ P \ 1] \) and filter size \( [A \ B \ 1 \ 1] \), the following set-builder notation gives a formal definition of all convolutions performed in this mode.
\( \underset{[M \ N \ P \ 1]}{O} \) = \( \left\{ \underset{[M \ N \ p \ 1]}{s} \ast \underset{[A \ B \ 1 \ 1]}{F} \ \Bigg\vert \ \forall \underset{[M \ N \ p \ 1]}{s} \in \underset{[M \ N \ P \ 1]}{S} \right\} \)
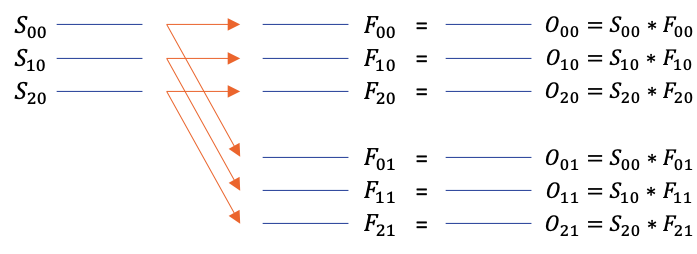
Given below is an example of identical batch mode.

For input size \( [M \ N \ P \ Q] \) and filter size \( [A \ B \ P \ Q] \), the following set-builder notation gives a formal definition of all convolutions performed in this mode.
\( \underset{[M \ N \ P \ Q]}{O} \) = \( \left\{ \underset{[M \ N \ p \ q]}{s} \ast \underset{[A \ B \ p \ q]}{f} \ \Bigg\vert \ \forall \underset{[M \ N \ p \ q]}{s} \in \underset{[M \ N \ P \ Q]}{S} \land \forall \underset{[M \ N \ p \ q]}{f} \in \underset{[M \ N \ P \ Q]}{F} \right\} \)
Four different kinds of signal and filter size combinations are handled in this batch mode. Each one of them are explained in respective sections below.
For input size \( [M \ N \ P \ 1] \) and filter size \( [A \ B \ 1 \ Q] \), the following set-builder notation gives a formal definition of all convolutions performed in this mode.
\( \underset{[M \ N \ P \ Q]}{O} \) = \( \left\{ \left\{ \underset{[M \ N \ p \ 1]}{s} \ast \underset{[A \ B \ 1 \ q]}{f} \ \Bigg\vert \ \forall \underset{[M \ N \ p \ 1]}{s} \in \underset{[M \ N \ P \ 1]}{S} \right\} \ \Bigg\vert \ \forall \underset{[A \ B \ 1 \ q]}{f} \in \underset{[A \ B \ 1 \ Q]}{F} \right\} \)
Given below is an example of this batch mode.
For input size \( [M \ N \ P \ 1] \) and filter size \( [A \ B \ P \ Q] \), the following set-builder notation gives a formal definition of all convolutions performed in this mode.
\( \underset{[M \ N \ P \ Q]}{O} \) = \( \left\{ \left\{ \underset{[M \ N \ p \ 1]}{s} \ast \underset{[A \ B \ p \ q]}{f} \ \Bigg\vert \ \forall \underset{[A \ B \ p \ q]}{f} \in \underset{[A \ B \ P \ Q]}{F} \right\} \ \Bigg\vert \ \forall \underset{[M \ N \ p \ 1]}{s} \in \underset{[M \ N \ P \ 1]}{S} \right\} \)
Given below is an example of this batch mode.
For input size \( [M \ N \ 1 \ P] \) and filter size \( [A \ B \ Q \ 1] \), the following set-builder notation gives a formal definition of all convolutions performed in this mode.
\( \underset{[M \ N \ Q \ P]}{O} \) = \( \left\{ \left\{ \underset{[M \ N \ 1 \ p]}{s} \ast \underset{[A \ B \ q \ 1]}{f} \ \Bigg\vert \ \forall \underset{[M \ N \ 1 \ p]}{s} \in \underset{[M \ N \ 1 \ P]}{S} \right\} \ \Bigg\vert \ \forall \underset{[A \ B \ q \ 1]}{f} \in \underset{[A \ B \ Q \ 1]}{F} \right\} \)
Given below is an example of this batch mode.
For input size \( [M \ N \ P \ Q] \) and filter size \( [A \ B \ P \ 1] \), the following set-builder notation gives a formal definition of all convolutions performed in this mode.
\( \underset{[M \ N \ P \ Q]}{O} \) = \( \left\{ \left\{ \underset{[M \ N \ p \ q]}{s} \ast \underset{[A \ B \ p \ 1]}{f} \ \Bigg\vert \ \forall \underset{[M \ N \ p \ q]}{s} \in \underset{[M \ N \ P \ Q]}{S} \right\} \ \Bigg\vert \ \forall \underset{[A \ B \ p \ 1]}{f} \in \underset{[A \ B \ P \ 1]}{F} \right\} \)
Given below is an example of this batch mode.
The batching behavior of convolve2NN functions(af_convolve2_nn() and af::convolve2NN() ) is different from convolve2. The new functions can perform 2D convolution on 3D signals and filters in a way that is more aligned with convolutional neural networks.
| Signal Size | Filter Size | Output Size | Batch Mode | Description |
|---|---|---|---|---|
| \( [M \ N \ 1 \ 1] \) | \( [M \ N \ 1 \ 1] \) | \( [M \ N \ 1 \ 1] \) | No Batch | Output will be a single convolved array |
| \( [M \ N \ 1 \ 1] \) | \( [M \ N \ P \ 1] \) | \( [M \ N \ P \ 1] \) | Invalid | Size along second axis should be same |
| \( [M \ N \ P \ 1] \) | \( [M \ N \ 1 \ 1] \) | \( [M \ N \ P \ 1] \) | Invalid | Size along second axis should be same |
| \( [M \ N \ P \ 1] \) | \( [M \ N \ P \ 1] \) | \( [M \ N \ 1 \ 1] \) | No Batch | 3D Signal and 3D filter convoled to 2D result |
| \( [M \ N \ P \ Qs] \) | \( [M \ N \ P \ Qf] \) | \( [M \ N \ Qf \ Qs] \) | Batch Qs * Qf | Qs signals and Qf filters to create Qs * Qf results |
| AFAPI af_err af_convolve2 | ( | af_array * | out, |
| const af_array | signal, | ||
| const af_array | filter, | ||
| const af_conv_mode | mode, | ||
| af_conv_domain | domain | ||
| ) |
C Interface for convolution on two dimensional signals.
| [out] | out | is convolved array |
| [in] | signal | is the input signal |
| [in] | filter | is the signal that shall be flipped for the convolution operation |
| [in] | mode | indicates if the convolution should be expanded or not(where output size equals input) |
| [in] | domain | specifies if the convolution should be performed in frequency os spatial domain |
domain, AF_CONV_AUTO, heuristically switches between frequency and spatial domain. | AFAPI af_err af_convolve2_nn | ( | af_array * | out, |
| const af_array | signal, | ||
| const af_array | filter, | ||
| const unsigned | stride_dims, | ||
| const dim_t * | strides, | ||
| const unsigned | padding_dims, | ||
| const dim_t * | paddings, | ||
| const unsigned | dilation_dims, | ||
| const dim_t * | dilations | ||
| ) |
C Interface for 2D convolution.
This version of convolution is consistent with the machine learning formulation that will spatially convolve a filter on 2-dimensions against a signal. Multiple signals and filters can be batched against each other. Furthermore, the signals and filters can be multi-dimensional however their dimensions must match.
Example: Signals with dimensions: d0 x d1 x d2 x Ns Filters with dimensions: d0 x d1 x d2 x Nf
Resulting Convolution: d0 x d1 x Nf x Ns
| [out] | out | is convolved array |
| [in] | signal | is the input signal |
| [in] | filter | is the filter that will be used for the convolution operation |
| [in] | stride_dims | specifies the number of stride dimension parameters |
| [in] | strides | array of values specifying the amounts the filter strides along each dimension |
| [in] | padding_dims | specifies the number of padding dimension parameters |
| [in] | paddings | array of values specifying the amounts to pad along each dimension |
| [in] | dilation_dims | specifies the number of dilation dimension parameters |
| [in] | dilations | array of values specifying the amounts to dilate the filter before convolving along each dimension |
| AFAPI af_err af_fft_convolve2 | ( | af_array * | out, |
| const af_array | signal, | ||
| const af_array | filter, | ||
| const af_conv_mode | mode | ||
| ) |
C Interface for convolution on 2D signals using FFT.
| [out] | out | is convolved array |
| [in] | signal | is the input signal |
| [in] | filter | is the signal that shall be used for the convolution operation |
| [in] | mode | indicates if the convolution should be expanded or not(where output size equals input) |
| AFAPI array convolve2 | ( | const array & | signal, |
| const array & | filter, | ||
| const convMode | mode = AF_CONV_DEFAULT, |
||
| const convDomain | domain = AF_CONV_AUTO |
||
| ) |
C++ Interface for convolution on two dimensional signals.
| [in] | signal | is the input signal |
| [in] | filter | is the signal that shall be flipped for the convolution operation |
| [in] | mode | indicates if the convolution should be expanded or not(where output size equals input) |
| [in] | domain | specifies if the convolution should be performed in frequency os spatial domain |
domain, AF_CONV_AUTO, heuristically switches between frequency and spatial domain. | AFAPI array convolve2NN | ( | const array & | signal, |
| const array & | filter, | ||
| const dim4 | stride, | ||
| const dim4 | padding, | ||
| const dim4 | dilation | ||
| ) |
C++ Interface for 2D convolution.
This version of convolution is consistent with the machine learning formulation that will spatially convolve a filter on 2-dimensions against a signal. Multiple signals and filters can be batched against each other. Furthermore, the signals and filters can be multi-dimensional however their dimensions must match.
Example: Signals with dimensions: d0 x d1 x d2 x Ns Filters with dimensions: d0 x d1 x d2 x Nf
Resulting Convolution: d0 x d1 x Nf x Ns
| [in] | signal | is the input signal |
| [in] | filter | is the filter that will be used for the convolution operation |
| [in] | stride | specifies the filter strides along each dimension |
| [in] | padding | specifies the padding along each dimension |
| [in] | dilation | specifies the amount to dilate the filter before convolution |
| AFAPI array fftConvolve2 | ( | const array & | signal, |
| const array & | filter, | ||
| const convMode | mode = AF_CONV_DEFAULT |
||
| ) |
C++ Interface for convolution on 2D signals using FFT.
| [in] | signal | is the input signal |
| [in] | filter | is the signal that shall be used for the convolution operation |
| [in] | mode | indicates if the convolution should be expanded or not(where output size equals input) |